from picamera.array import PiRGBArray
from picamera import PiCamera
import cv2
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
#Setup the GPIO mode as pin-coded
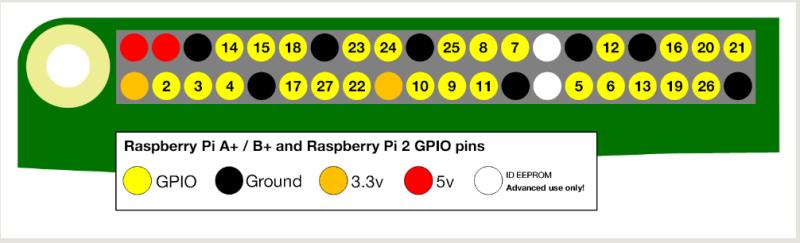
TRANS_OUT=18 #Set GPIO 18 as output mode
GPIO.setup(TRANS_OUT, GPIO.OUT)
camera = PiCamera()
#Setup the camera
camera.resolution = ( 320, 240 )
camera.framerate = 60
rawCapture= PiRGBArray( camera, size=( 320, 240 ) )
face_cascade = cv2.CascadeClassifier( '/home/pi/opencv-3.0.0/data/lbpcascades/lbpcascade_frontalface.xml' )
#Load a cascade file for detecting faces
for frame in camera.capture_continuous( rawCapture, format="bgr", use_video_port=True ):
#Capture frames from the camera
image = frame.array #Use the cascade file we loaded to detect faces
gray = cv2.cvtColor( image, cv2.COLOR_BGR2GRAY )
faces = face_cascade.detectMultiScale( gray )
print "Found " + str( len( faces ) ) + " face(s)"
#Draw a rectangle around every face
for ( x, y, w, h ) in faces:
cv2.rectangle( image, ( x, y ), ( x + w, y + h ), ( 100, 255, 100 ), 2 )
cv2.putText( image, "Face No." + str( len( faces ) ), ( x, y ), cv2.FONT_HERSHEY_SIMPLEX, 0.5, ( 0, 0, 255 ), 2 )
temp=len(faces)
if temp!=0:
GPIO.output(TRANS_OUT,True)
test=True
else:
GPIO.output(TRANS_OUT,False)
test=False
cv2.imshow( "Frame", image )
#Show the frame
cv2.waitKey( 1 )
#Clear the stream in preparation for the next frame
rawCapture.truncate( 0 )
GPIO.cleanup()